

开源 | 北京理工大学FSAC开源平台2.0上线
文案:封蕴籍 供图:陈泰然、封蕴籍 编辑:孙小晴
开源2.0
几年来,经过几届队员的不断努力,北京理工大学无人驾驶方程式车队在中国大学生无人方程式大赛 (FSAC) 中获得了三金一银的成绩,并逐步形成自己的无人系统体系。针对国内车队与国外车队仍差距较大的问题,我们希望通过开源简单、稳定的算法,帮助参与大学生无人驾驶方程式赛事的车队在无人系统层面共同发展。2020年同期,我们成功开源感知、定位和规划的部分算法(查看详情),并向多所高校提供数据集。
为帮助新车队快速搭建一个简单稳定的无人系统,我们决定在2021年聚焦整个无人系统的构建工作,提供一个可以简单上手并实现算法仿真的基础系统。
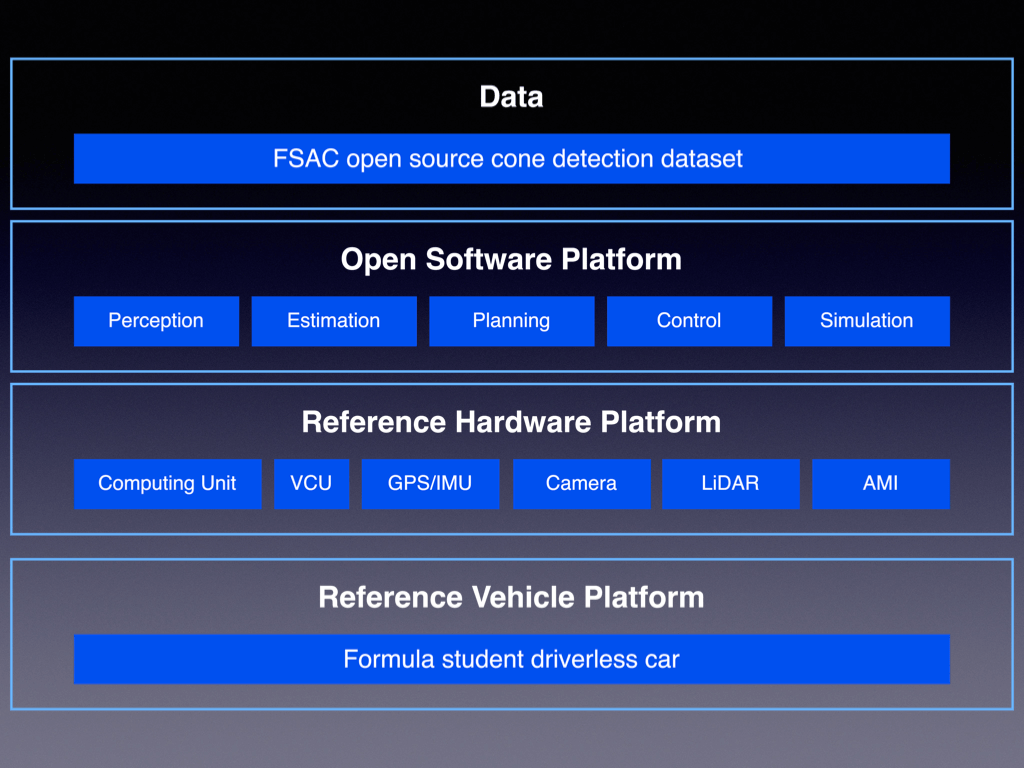
系统结构图
内容简介
- 基于[bitfsd/fssim](https://github.com/bitfsd/fssim)开发的全栈仿真
- 实时目标检测及点云聚类的感知算法
- 针对三个赛项(直线、八字、高速循迹)的Pure Pursuit和MPC控制算法
- 仿真和算法之间必要的脚本
Fssim仿真
https://github.com/bitfsd/fssim
比赛表明对于相同赛道,仿真和实车的每圈用时误差在 1%(比赛中三圈圈速最大可测量误差0.01s),满足开发需求。
fssim
感知算法
https://github.com/bitfsd/fsd_algorithm
https://github.com/bitfsd/darknet_ros
在2020年开源算法的基础上,更新darknet_ros,加入YOLOv4 以及YOLO v4 tiny检测模型,并支持FP16精度推理,在GPU上能够得到3倍的加速,并支持时间戳同步。
数据集[FSACOCO]
( https://github.com/bitfsd/FSACOCO)
yolov4-tiny
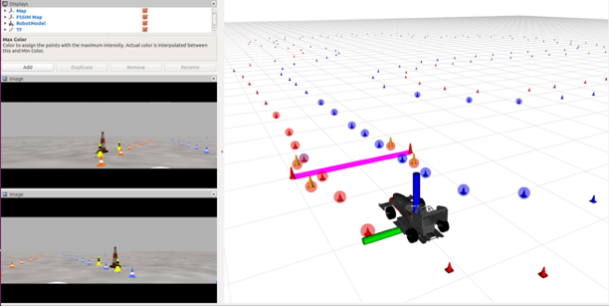
在雷达点云聚类识别方面,开源的Lidar_Cluster功能包从点云范围裁剪开始,通过对点云进行欧式聚类和锥桶重构,进行锥桶识别。
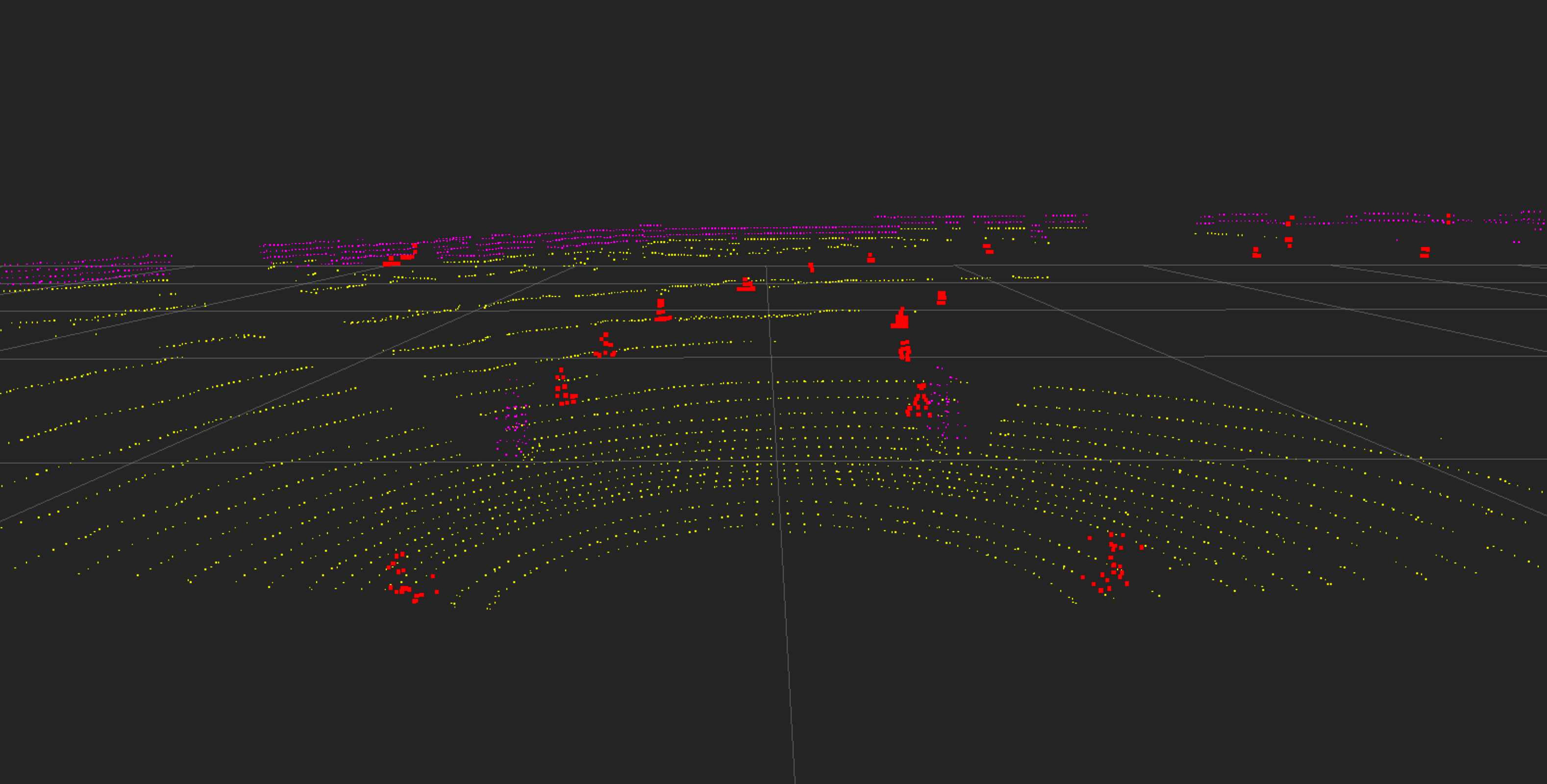
点云
控制算法
https://github.com/bitfsd/fsd_algorithm
在control功能包内我们针对三个赛项提供了Pure Pursuit和MPC两种控制算法:
- 直线、八字、循迹的Pure Pursuit
- 直线、八字、循迹的MPC
FSACOCO锥桶数据集
https://github.com/bitfsd/FSACOCO
自2020年数据集开源以来,FSACOCO数据集已被多家车队使用,并得到了来自福州大学、北京航空航天大学、西华大学、湖南大学等高校的数据集支持。团队通过开源数据平台进行目标检测算法的训练,在感知效果方面取得了显著的进步。2021年将推进数据平台的构建,欢迎各车队对数据集进行扩充。
灰鲨Ⅳ高速循迹第一视角
致谢
该平台非赛事官方组织,仅由北京理工大学无人驾驶方程式车队队员自发组成。
若有任何不妥或不便之处,欢迎通过email:bitfsd@163.com进行反馈与批评指正,给出意见,感谢各家车队的支持与信任。
最后,感谢赛事组委会、学校、赞助商以及各位队员多年来的支持。
另,特别鸣谢以陈泰然为代表的为该平台提供重大帮助的队员。
2017-2020赛季队长:
潘 博 董国顺 高小栋
朱超峰 李惠乾
2017赛季无人系统组:
田汉青 田戴荧 刘庆霄
2018赛季无人系统组:
陈泰然 李子睿 何羿霆
徐泽文 武润培 张春阳
2019赛季无人系统组:
李 想 王相彭 高旅业
丁秋雨 李炜玲
2020赛季无人系统组:
吕文成 高欣彧 黄宸睿 龚海龙
杨少坤 封蕴籍 李云巍
感谢学校与赞助商的大力支持!


